lsodar_bouncing_ball.py¶
-
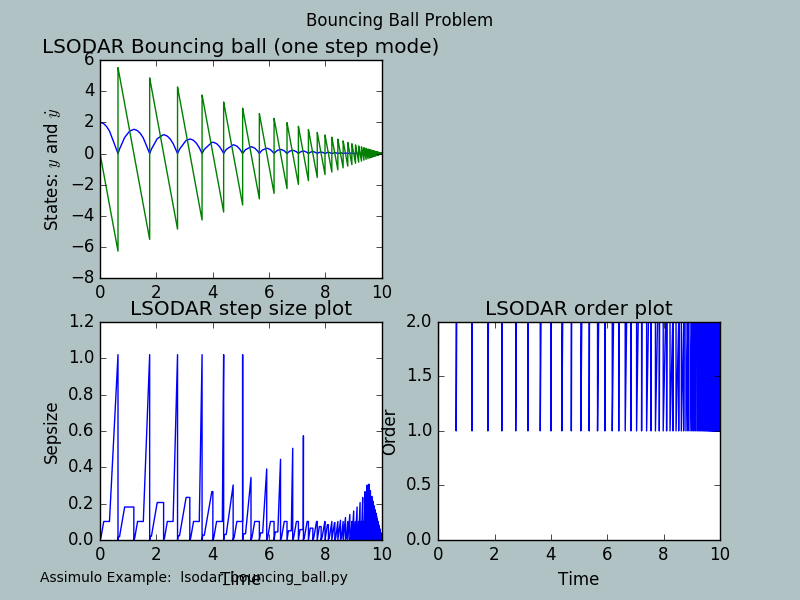
assimulo.examples.lsodar_bouncing_ball.run_example(with_plots=True)[source]¶ Bouncing ball example to demonstrate LSODAR’s discontinuity handling.
Also a way to use problem.initialize and problem.handle_result in order to provide extra information is demonstrated.
The governing differential equation is
\[\begin{split}\dot y_1 &= y_2\\ \dot y_2 &= -9.81\end{split}\]and the switching functions are
\[\begin{split}\mathrm{event}_0 &= y_1 \;\;\;\text{ if } \;\;\;\mathrm{sw}_0 = 1\\ \mathrm{event}_1 &= y_2 \;\;\;\text{ if }\;\;\; \mathrm{sw}_1 = 1\end{split}\]otherwise the events are deactivated by setting the respective value to something different from 0.
The event handling sets
\(y_1 = - 0.88 y_1\) and \(\mathrm{sw}_1 = 1\) if the first event triggers and \(\mathrm{sw}_1 = 0\) if the second event triggers.
Warning: Possible chattering detected at t = 9.921283e+00 in state event(s): [0]
Final Run Statistics: Bouncing Ball Problem
Number of steps : 521
Number of function evaluations : 924
Number of Jacobian evaluations : 0
Number of state function evaluations : 2158
Number of state events : 122
Solver options:
Solver : LSODAR
Absolute tolerances : [ 1.00000000e-08 1.00000000e-08]
Relative tolerances : 1e-06
Starter : classical
Simulation interval : 0.0 - 10.0 seconds.
Elapsed simulation time: 0.0729551315308 seconds.
Note
Press [source] (to the top right) to view the example.